 پارس پروژه | هر ایده بذری است ما خاک حاصلخیز شکوفایی آنیم
پارس پروژه | هر ایده بذری است ما خاک حاصلخیز شکوفایی آنیم



روش های کنترل موتور براشلس
1. Six-Step (Trapezoidal Control)
در این روش کنترل موتور براشلس، کموتاسیون به صورت شش مرحلهای انجام میشود. در هر لحظه دو فاز موتور فعال هستند و فاز سوم آزاد است. موقعیت روتور معمولاً با سنسورهای هال یا با اندازهگیری Back-EMF تشخیص داده میشود و هر ۶۰ درجه الکتریکی وضعیت سوئیچینگ اینورتر تغییر میکند. این روش ساختار بسیار ساده و هزینه کمی دارد، اما به دلیل شکل جریان ذوزنقهای باعث ریپل گشتاور و صدای بیشتر میشود و دقت کنترل آن نسبت به روشهای پیشرفته کمتر است.
2. FOC (Field Oriented Control)
در این روش که به آن کنترل برداری هم گفته میشود، جریانهای سهفاز موتور به کمک تبدیلهای ریاضی (Clarke و Park) به دو مؤلفه در محورهای d و q تبدیل میشوند. سپس جریان محور q برای تولید گشتاور و جریان محور d برای کنترل شار تنظیم میشود. با این کار موتور تقریباً مانند یک موتور DC با کنترل دقیق گشتاور رفتار میکند. این روش باعث گشتاور نرم، راندمان بالا و صدای کمتر میشود، اما پیادهسازی آن پیچیدهتر است و معمولاً به پردازنده قویتر و اندازهگیری یا تخمین دقیق موقعیت روتور نیاز دارد.
3. DTC (Direct Torque Control)
در روش کنترل مستقیم گشتاور، گشتاور و شار موتور به صورت مستقیم از روی جریانها و ولتاژهای استاتور تخمین زده میشوند. سپس با استفاده از یک جدول انتخاب بردار ولتاژ، وضعیت کلیدهای اینورتر طوری انتخاب میشود که خطای گشتاور و شار سریعاً اصلاح شود. این روش پاسخ دینامیکی بسیار سریع دارد و ساختار آن از نظر مفهومی نسبتاً ساده است، اما معمولاً باعث ریپل بیشتر در گشتاور و جریان و همچنین فرکانس سوئیچینگ متغیر میشود. این روش بیشتر در درایوهای صنعتی با نیاز به پاسخ سریع استفاده میشود.
| روش کنترل | روش کار | مزایا | معایب | کاربردها |
|---|---|---|---|---|
| Six-Step (Trapezoidal) | کموتاسیون موتور در ۶ مرحله انجام میشود. در هر لحظه دو فاز فعال و یک فاز آزاد است. موقعیت روتور معمولاً با سنسور هال یا Back‑EMF تشخیص داده میشود و هر ۶۰ درجه الکتریکی وضعیت کلیدهای اینورتر تغییر میکند. | ساختار ساده، هزینه پایین، پیادهسازی آسان | ریپل گشتاور زیاد، صدای بیشتر، دقت کنترل کمتر | فنها، پمپها، ابزارهای ساده، درایوهای ارزان |
| FOC (Field Oriented Control) | جریانهای سهفاز با تبدیلهای Clarke و Park به محورهای d و q تبدیل میشوند. جریان محور q گشتاور و محور d شار را کنترل میکند و موتور مانند موتور DC با کنترل دقیق گشتاور عمل میکند. | گشتاور نرم، راندمان بالا، صدای کم، کنترل دقیق سرعت و گشتاور | پیچیدگی بیشتر، نیاز به پردازنده قویتر و تخمین یا اندازهگیری موقعیت روتور | خودروهای الکتریکی، سروو درایوها، رباتیک، پهپاد |
| DTC (Direct Torque Control) | گشتاور و شار موتور مستقیماً از ولتاژ و جریان استاتور تخمین زده میشوند. سپس با استفاده از جدول انتخاب بردار ولتاژ، کلیدهای اینورتر برای اصلاح سریع خطای گشتاور و شار تغییر میکنند. | پاسخ گشتاور بسیار سریع، ساختار کنترلی نسبتاً ساده | ریپل گشتاور و جریان بیشتر، فرکانس سوئیچینگ متغیر | درایوهای صنعتی، کاربردهای توان بالا با پاسخ سریع |
پروژه متن باز VESC
VESC (Vedder Electronic Speed Controller) یک پروژه متنباز (Open Source) برای کنترل موتورهای براشلس است که توسط Benjamin Vedder توسعه داده شده است. هدف این پروژه ساخت یک کنترلر موتور پیشرفته، قابل برنامهریزی و متنباز است که بتواند انواع موتورهای الکتریکی را با روشهای کنترلی مدرن راهاندازی کند.
در VESC سختافزار و نرمافزار هر دو بهصورت متنباز منتشر شدهاند، بنابراین توسعهدهندگان میتوانند آن را تغییر دهند، بهبود دهند یا در پروژههای خود استفاده کنند. این کنترلر معمولاً از میکروکنترلر STM32 استفاده میکند و از روشهای کنترل مختلفی مانند FOC (Field Oriented Control) و Six‑Step برای کنترل موتورهای BLDC و PMSM پشتیبانی میکند.
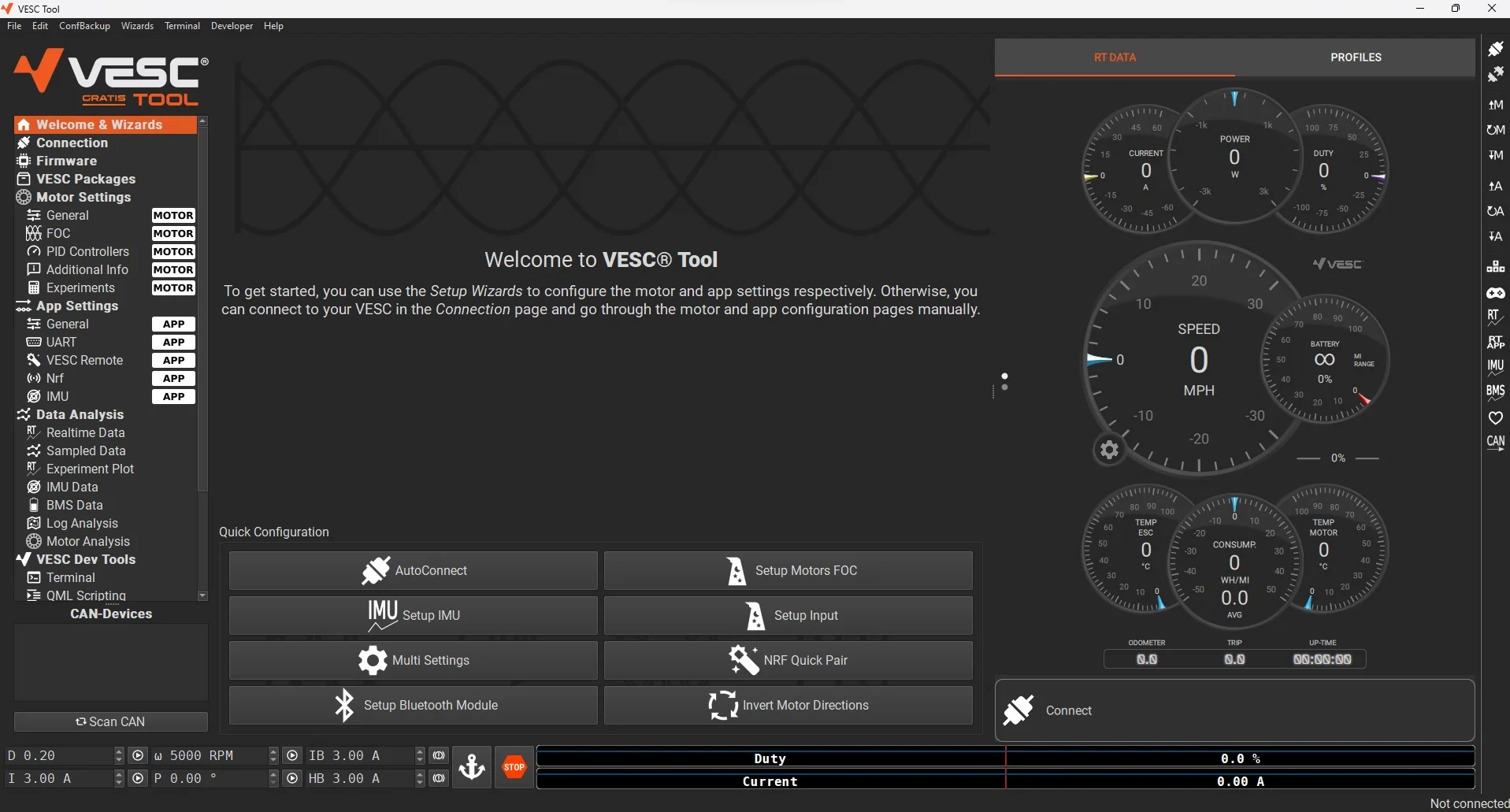
یکی از ویژگیهای مهم VESC وجود نرمافزار VESC Tool است که امکان تنظیم پارامترهای موتور، مانیتورینگ دادهها، تنظیم جریان و سرعت، و عیبیابی را بهصورت گرافیکی فراهم میکند.
به دلیل انعطافپذیری بالا، VESC در کاربردهای مختلفی مانند اسکیتبرد برقی، دوچرخه و اسکوتر برقی، رباتیک، پهپادها و پروژههای تحقیقاتی استفاده میشود.
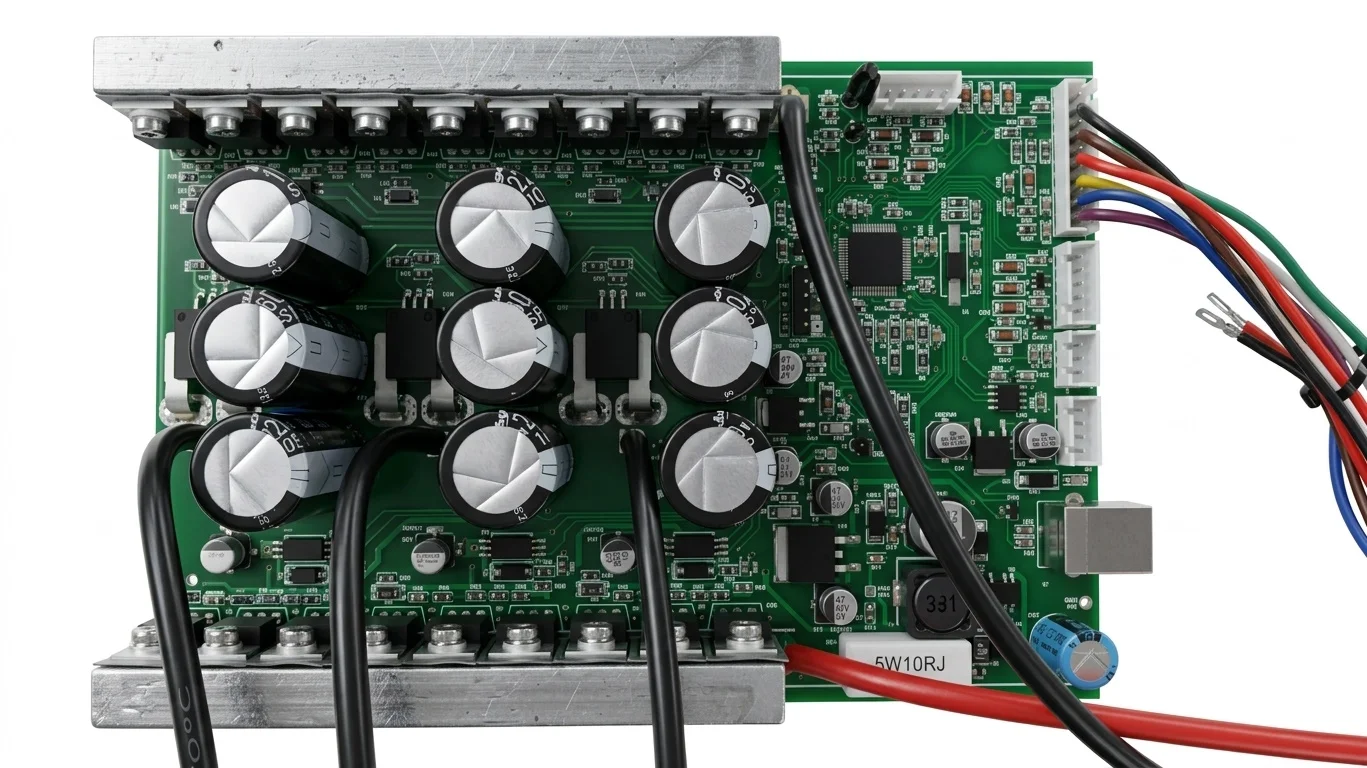
درایور موتور براشلس 5 کیلووات مبتنی بر VESC
این درایور موتور براشلس بر پایه پروژه متنباز VESC (Vedder Electronic Speed Controller) طراحی شده و برای کنترل دقیق موتورهای BLDC و PMSM توسعه یافته است. استفاده از الگوریتمهای پیشرفته کنترل موتور در این درایور باعث میشود موتور با راندمان بالا، گشتاور نرم و پاسخ دینامیکی سریع کار کند.
این محصول برای کاربردهای توان متوسط تا بالا مانند دوچرخه و اسکوتر برقی، رباتیک، خودروهای الکتریکی سبک، AGV، ماشینآلات و پروژههای تحقیقاتی مناسب است.
ویژگیهای کلیدی
• توان خروجی تا 10 کیلووات
• محدوده ولتاژ کاری 48 تا 100 ولت
• حداکثر جریان فاز تا 100 آمپر
• پشتیبانی از موتورهای BLDC و PMSM
• کنترل بسیار نرم و دقیق با الگوریتم FOC
• پشتیبانی از کنترل Six‑Step
• امکان بازیابی انرژی (Regenerative Braking)
• راندمان بالا و ریپل گشتاور کم
• سازگار با اکوسیستم کامل VESC
قابلیتهای کنترلی
این کنترلر امکان کنترل موتور به روشهای مختلف را فراهم میکند و میتواند در سیستمهای کنترلی متنوع مورد استفاده قرار گیرد:
• کنترل سرعت یا گشتاور
• کنترل از طریق PWM
• کنترل از طریق PPM (مناسب برای ریموت و RC)
• ورودی آنالوگ
• ارتباط UART برای اتصال به میکروکنترلر یا کامپیوتر
• ارتباط CAN Bus برای شبکه کردن چند درایور
نرمافزار و تنظیمات
این درایور به طور کامل با نرمافزار VESC Tool سازگار است. با استفاده از این نرمافزار میتوان به سادگی سیستم را پیکربندی و مانیتور کرد:
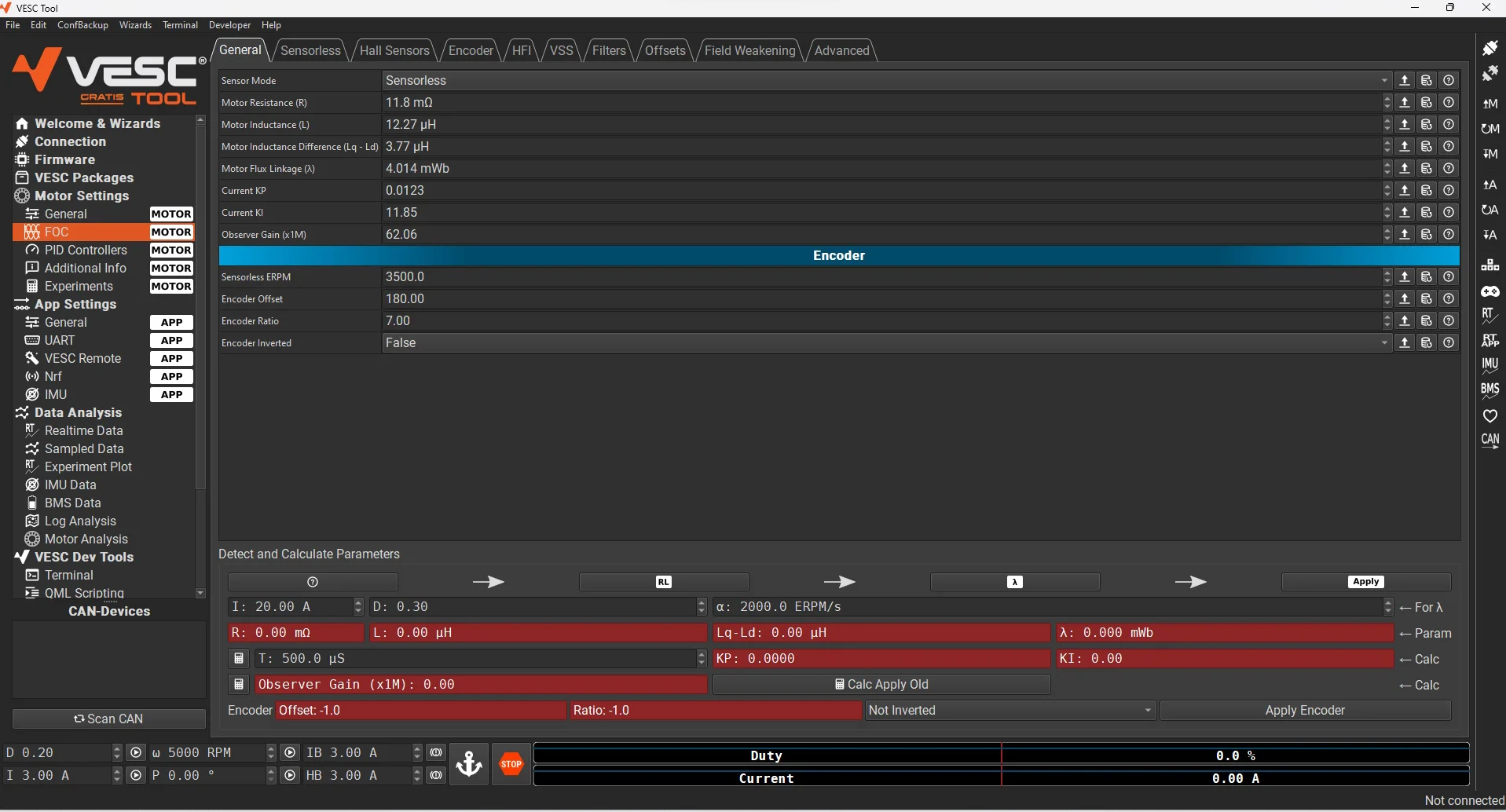
• شناسایی خودکار پارامترهای موتور (Motor Detection)
• تنظیم جریان، سرعت و توان خروجی
• مشاهده نمودارهای جریان، ولتاژ، سرعت و دما
• مانیتورینگ لحظهای عملکرد سیستم
• امکان بهروزرسانی Firmware
• ابزارهای عیبیابی و تنظیم پیشرفته
قابلیتهای حفاظتی
برای افزایش ایمنی و پایداری سیستم، این کنترلر به مجموعهای از حفاظتهای الکتریکی مجهز است:
• حفاظت اضافه جریان (Over Current)
• حفاظت اضافه ولتاژ (Over Voltage)
• حفاظت افت ولتاژ (Under Voltage)
• حفاظت افزایش دما (Over Temperature)
• حفاظت در برابر اتصال کوتاه
مشخصات فنی
ولتاژ کاری: 48 تا 100 ولت DC
حداکثر جریان فاز: 100 آمپر
توان قابل دستیابی: تا حدود 10 کیلووات
نوع موتور: BLDC / PMSM
روشهای کنترل: FOC ، Six‑Step
رابطهای ارتباطی: PWM ، PPM ، UART ، CAN Bus ، Analog
پیکربندی نرمافزاری: VESC Tool
کاربردها
• دوچرخه و اسکوتر برقی
• اسکیتبورد برقی
• رباتیک و AGV
• خودروهای الکتریکی سبک
• تجهیزات صنعتی
• پروژههای تحقیقاتی و دانشگاهی
مناسب برای چه کسانی است؟
این محصول گزینهای مناسب برای افراد و مجموعههای زیر است:
- طراحان و توسعهدهندگان سیستمهای الکترونیک قدرت
- تولیدکنندگان تجهیزات برقی و صنعتی
- دانشجویان و پژوهشگران حوزه الکترونیک و کنترل
- علاقهمندان به ساخت و توسعه درایورهای موتور
- شرکتهایی که به دنبال یک طراحی قابل توسعه و سفارشیسازی هستند
محتویات محصول
با خرید این محصول، فایلهای طراحی به همراه ویدیوی آموزشی در اختیار شما قرار میگیرد تا بتوانید:
- ساختار طراحی را بهطور کامل بررسی کنید
- نحوه عملکرد بخشهای مختلف مدار را یاد بگیرید
- پروژه را مطابق نیاز خود تغییر دهید
- درایور را برای کاربردهای مختلف توسعه دهید
محتویات فایل
- اسناد و دیتاشیت ها
- فایل های آموزش ویدویی
- فایل شماتیک در نرم افزار آلتیوم
- فایل pcb در نرم افزار آلتیوم
- فایل برد انکدر مطلق 14 بیتی
- فایل های ارائه
- فایل نرم افزار و کدهای میکروکنترلر
هنوز هیچ نقد و بررسی وجود ندارد.